


AutoNaut无人船采用波浪驱动和电驱动相结合的方式,使无人 船续航时间更长。采用卫星和无线电的方式进行遥控。AutoNaut无 人船可轻松实现航迹跟踪、位置保持、自动航向、以及避碰功能。 它下放和回收都很方便,非常适用于各种海洋应用。
行业应用:
• 海洋气象观察 • 被动声学监测 • 海洋环境监测
系统特点
• 续航时间长
• 具有避碰功能
• 使用波浪驱动,静水中可使用电驱动或混合驱动
• 支持搭载多种传感器
• 通过卫星和无线电进行远程控制
• 下放和回收都非常方便
• 可航迹跟踪、位置保持、自动航向
技术参数
| 船型 | 单体船 |
| 总长度 | 7m(2m,3m,5m可选) |
| 宽 | 0.9m |
| 排量 | 400kg |
| 吃水深度 | 1.0m |
| 负载 | 200kg |
| 栀杆高 | <3.5m |
| 速度 | 4~5节 |
| 下放/回收方式 | 可使用吊机、A型架 |
| 控制方式 | 卫星和无线电远程控制 |
| 功能 | 航迹跟踪、位置保持、自动航向、避碰 |
实际应用



其它相关产品

无人双体船 CAT-Surveyor
CAT-Surveyor是一款无人双体船(USV),有远程遥控和自动控制两种 模式。适用于所有港口和近岸地区的水文数据采集或水下区域的监 测。开放式结构可以搭载和集成各种传感器。岸上的控制计算机可 实…
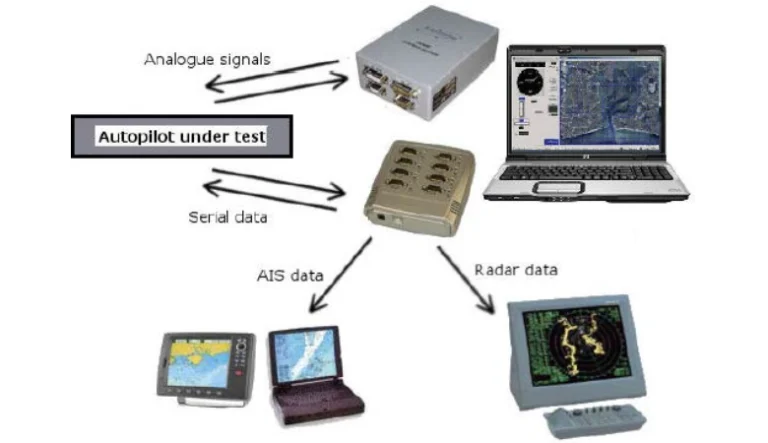
Ship Sim 3 水面船模拟仿真开发系统
ShipSim3是Dynautics公司研发的用于无人船开发设计的 一套系统,它能为用户提供一个海洋环境和船舶的视角,仿真船舶在海洋环境和引擎设置下的响应情况。这套系统可帮助用户研发设计无人船,支持I…

Catarob-ATS 无人双体船
Catarob-ATS是一款无人双体船(USV),有远程遥控和自动控制两 种模式。非常便携,适用于所有浅水区域的调查工作。开放式结构 可以搭载和集成各种传感器。岸上的控制计算机可实时显示并控制 导航信…